|
I am a research assistant professor in the Department of Mechanical and Automation Engineering at The Chinese University of Hong Kong (CUHK). I obtained my PhD degree from The Chinese University of Hong Kong (CUHK) in 2020, where I was advised by Prof. Yun-hui Liu and funded by HKPFS. I obtained my bachelor degree from Nanjing University in 2015, where I was advised by Prof. Wei Li. During my PhD, I did an internship at Tencent AI Lab, where I had a wonderful time working with Dr. Jianbo Jiao, Dr. Linchao Bao, Dr. Wei Liu, and other labmates. Before joining CUHK in 2023, I was a postdoctoral fellow at the Hong Kong Centre for Logistics Robotics and a visiting scholar at Tencent AI Lab and Johns Hopkins University. My research interets are computer vision, video understanding and their applications in meidical image analysis and surgical robots. I'm looking for motivated research assistants interetsed in surgical video analysis. If that sounds like you, feel free to reach out via email. CV / Google Scholar / Github / Email |

|
|
The full list of my puiblication can be found in my Google Scholar. |
|
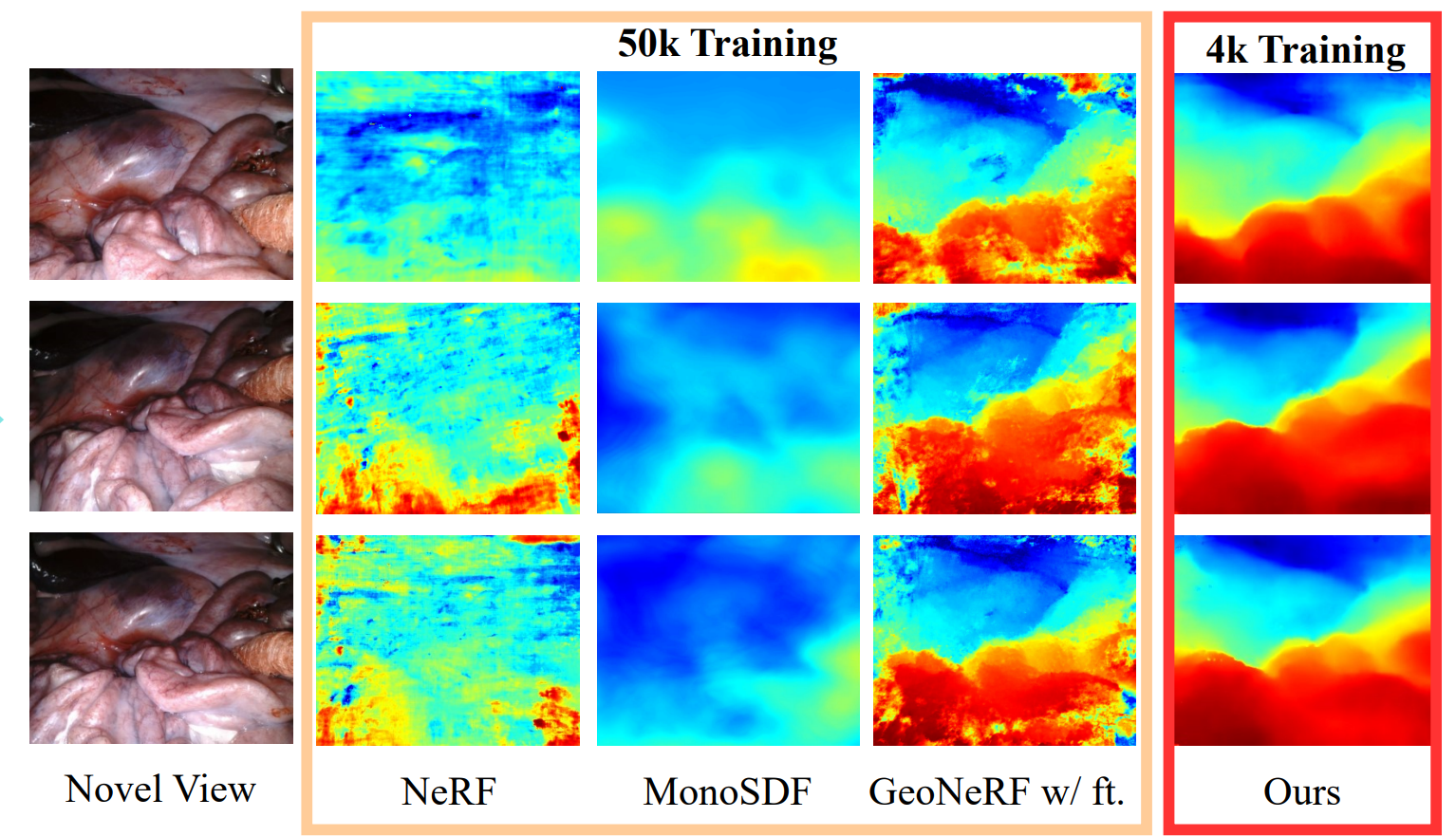
Jiaxin Guo, Jiangliu Wang , Ruofeng Wei, Di Kang, Qi Dou, Yun-hui Liu Transactions on Medical Imaging, 2024 pdf / code |
|
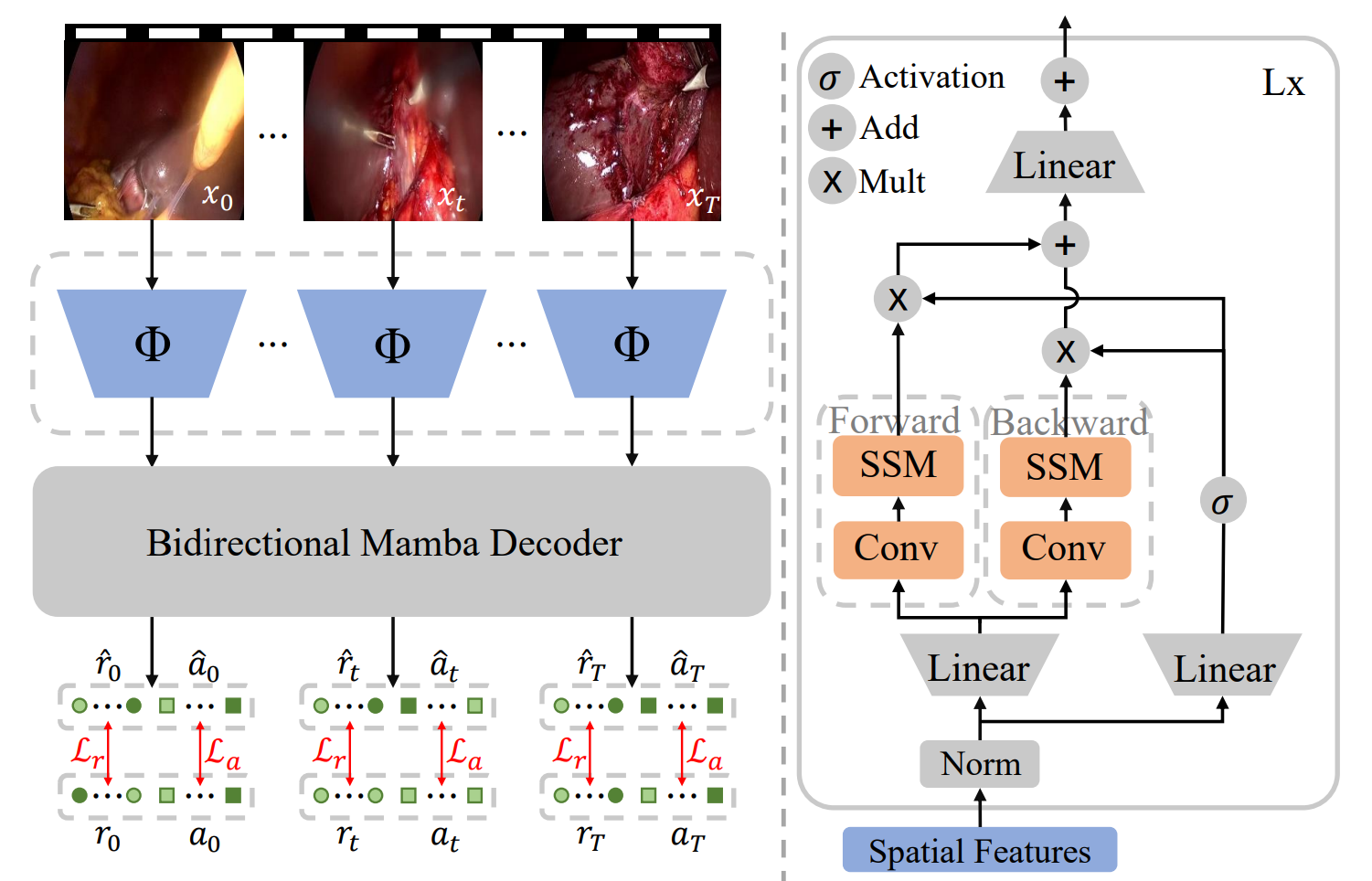
Rui Cao, Jiangliu Wang , Yun-hui Liu arXiv:2407.08333, 2024 pdf / code |
|
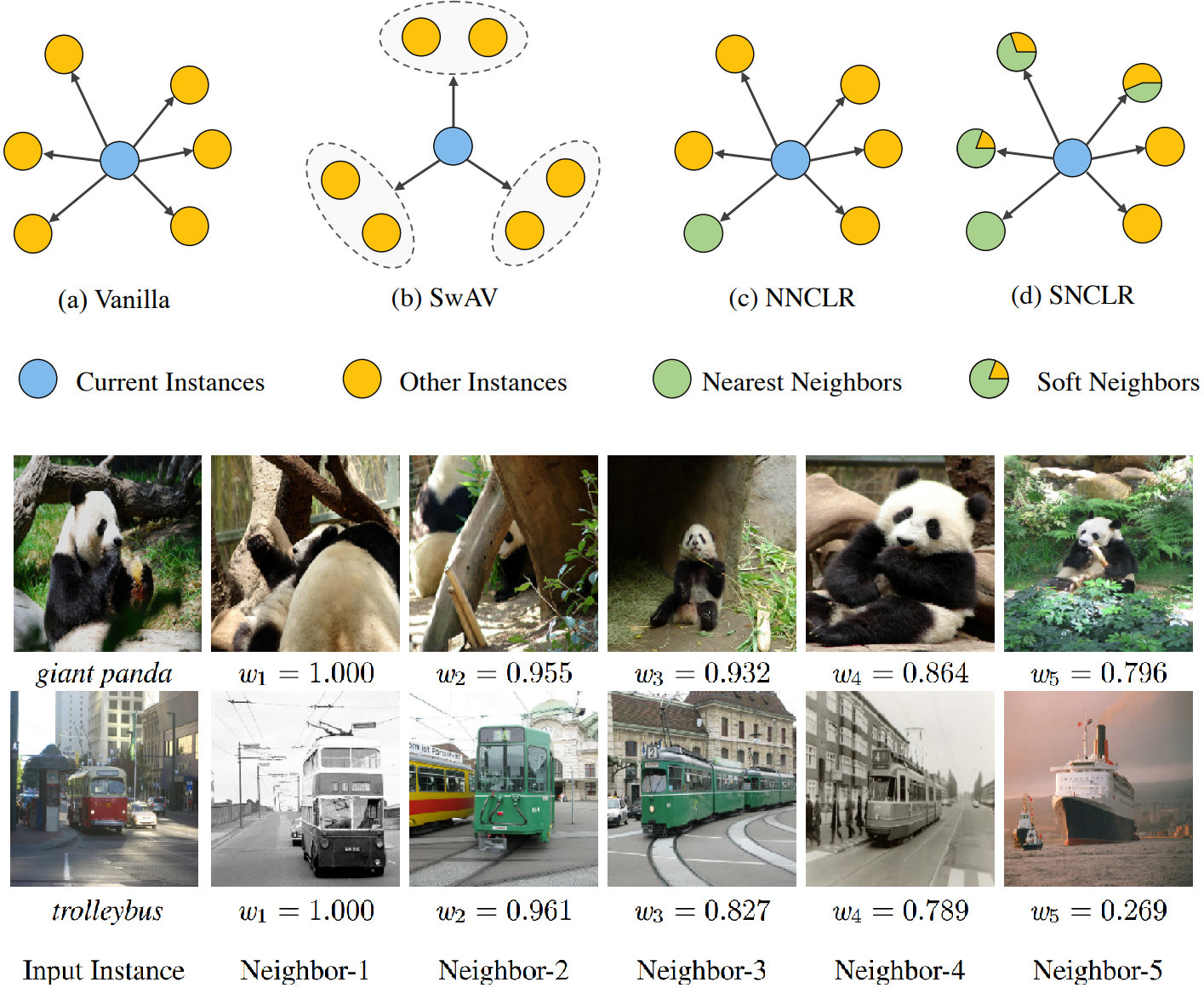
Chongjian Ge, Jiangliu Wang , Zhan Tong, Shoufa Chen, Yibing Song, Ping Luo, ICLR, 2023 pdf / code |
|
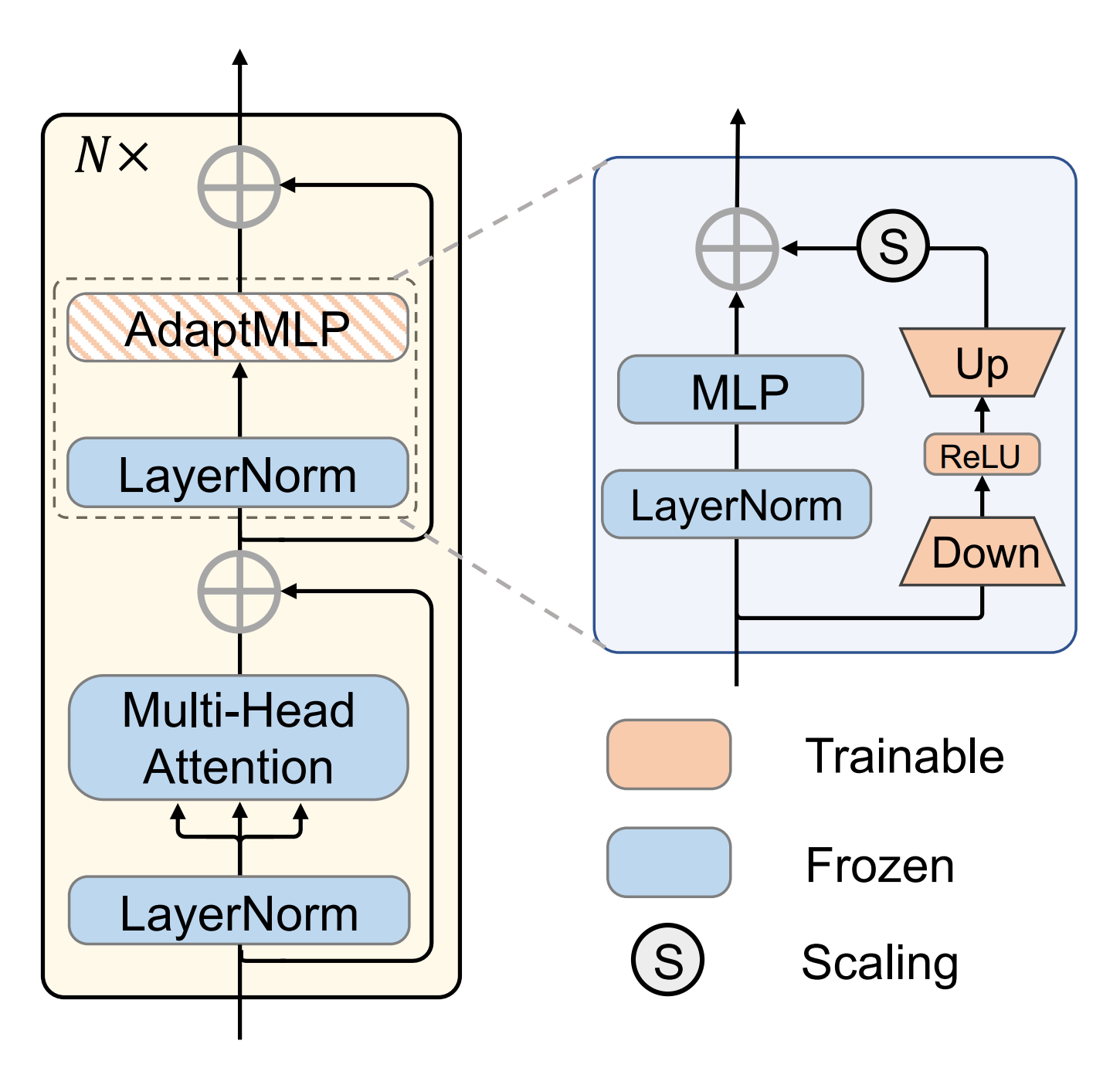
Shoufa Chen, Chongjian Ge, Zhan Tong, Jiangliu Wang , Yibing Song, Jue Wang, NeurIPS, 2022 pdf / code |
|
|
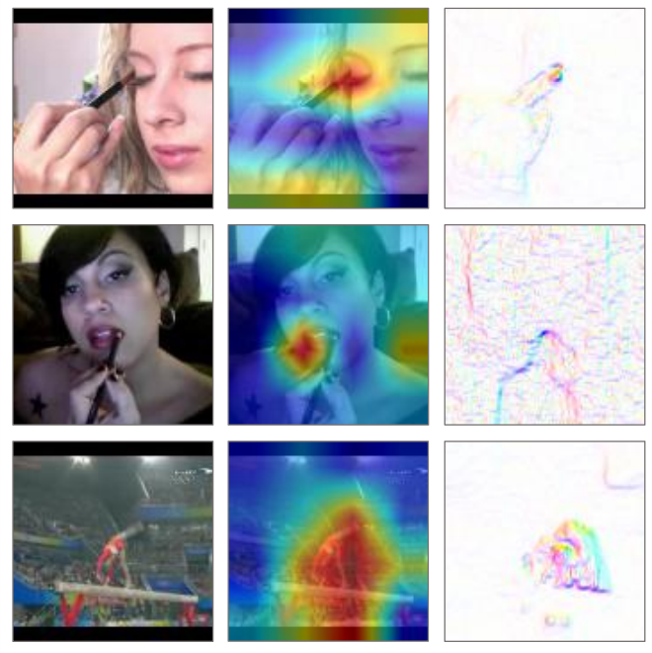
Jiangliu Wang* , Jianbo Jiao*, Linchao Bao, Shengfeng He, Wei Liu, Yun-hui Liu T-PAMI, 2022 pdf / early access / code / bibtex This work is an extension of our CVPR 2019 paper. I recommend the ablation study section. Our approach achieved decent performance after just one training epoch. |

|
Jiangliu Wang, Jianbo Jiao, Yun-hui Liu ECCV, 2020 pdf / short video / long video / code / bibtex This work is inspired by the observation that human visual system is sensitive to video pace, e.g., slow motion, a widely used technique in film making. |
|
Jiangliu Wang , Jianbo Jiao, Linchao Bao, Shengfeng He, Yun-hui Liu, Wei Liu CVPR, 2019 pdf / code / bibtex Neural networks are asked to predict motion and appearance statistics, including the largest motion area, largest and smallest color diversity areas. |
|
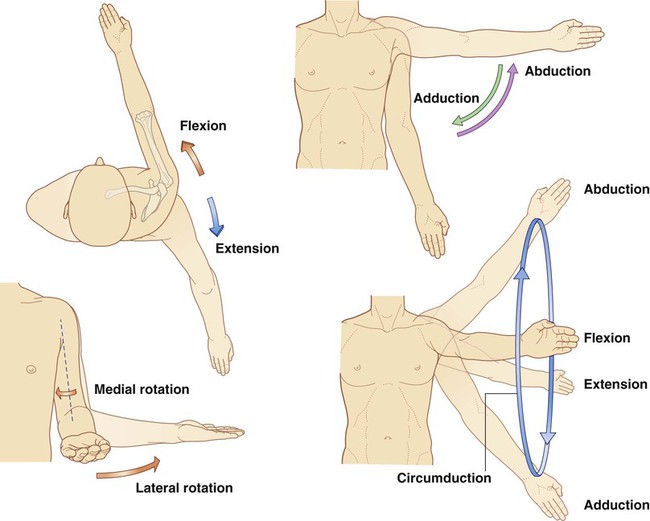
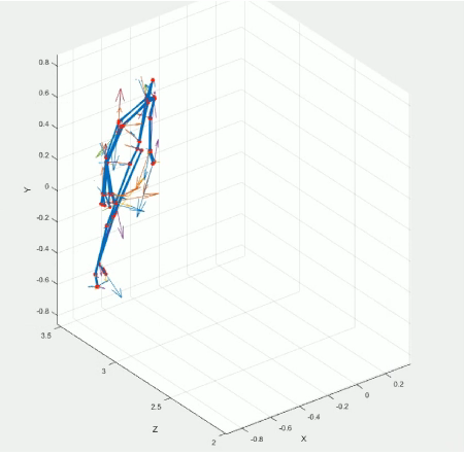
Qiang Nie, Jiangliu Wang, Xin Wang, Yun-hui Liu TIP, 2019 pdf / bibtex A 3D bio-constrained skeleton model is proposed to recover the corrupted skeletons and encode the body-level motion features into images. |
|
Jiangliu Wang , Yun-hui Liu WCICA, 2018 pdf / bibtex Temporal encoded kinematics features are proposed for action recognition, which compute the linear velocity and orientation displacement based on human skeleton data. |
|
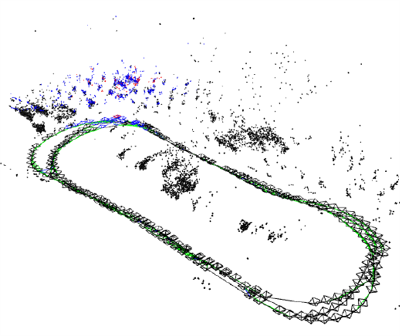
Yun-hui Liu, Fan Zheng, Ruibin Guo, Jiangliu Wang, Qiang Nie, Xin Wang, Zerui Wang, Chinese Journal of Electronics, 2018 pdf / bibtex This is an editor invitation paper. A brief review is presented to introduce our recent works on machine intelligence for real-world applications of robots. One technology leads to a startup company VisionNav. |
|
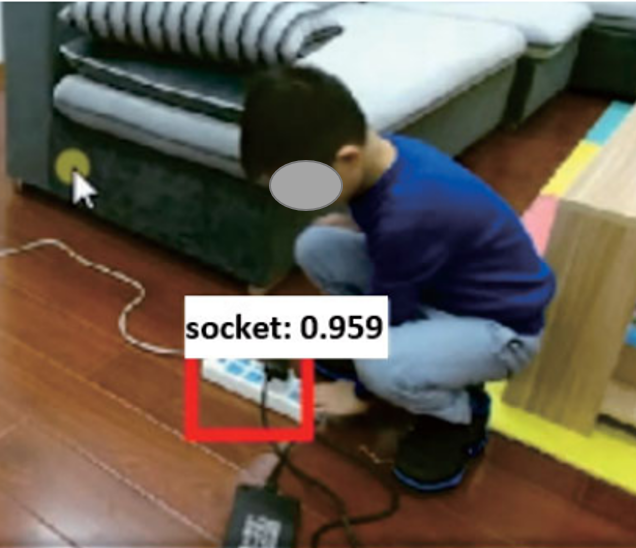
Qiang Nie, Xin Wang, Jiangliu Wang, Yun-hui Liu ROBIO, 2018 pdf / bibtex A caring robot is developed to detect dangerous behavior of children in the domestic environment based on action recognition and object recognition technologies. |
|
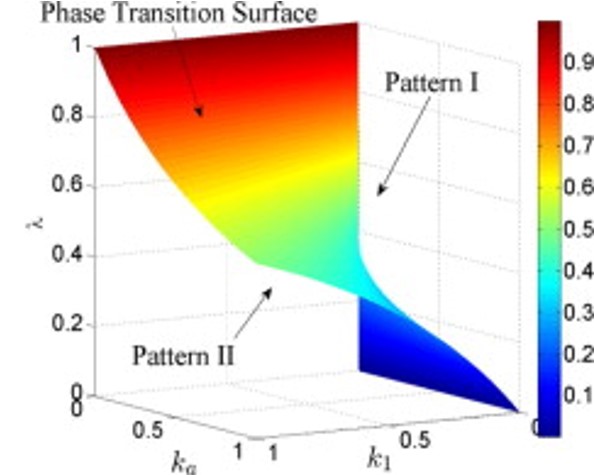
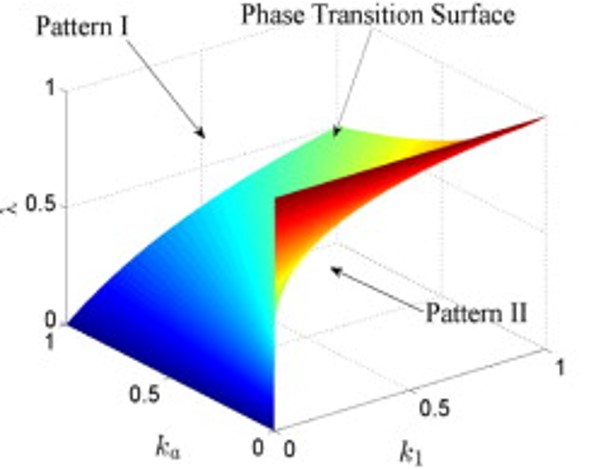
During my undergraduate study, I was lucky enough to work with Prof. Wei Li on a defense–intrusion interaction optimization problem. This work is published in a Tier 1 applied mathematics journal. |
|
Jiangliu Wang, Wei Li Communications in Nonlinear Science and Numerical Simulation, 2015 pdf / bibtex An optimal interception strategy of the defender is provided with interpretations of its physical meaning, which depends on relative mobility of the intruder and defender. |
|
|

|
Jiangliu Wang September, 2020 pdf / slides |
|
Reviewer of CVPR 2021, ICCV 2021, ICML 2021 Workshop on SSL, NeurIPS 2020 Workshop on SSL, ICRA 2020, IROS 2019, T-NNLS, RAM. |
|
Page template from Jonathan T. Barron. |